


Computer-assisted Image-guided Interventions
Prof. Dr. Andreas Melzer
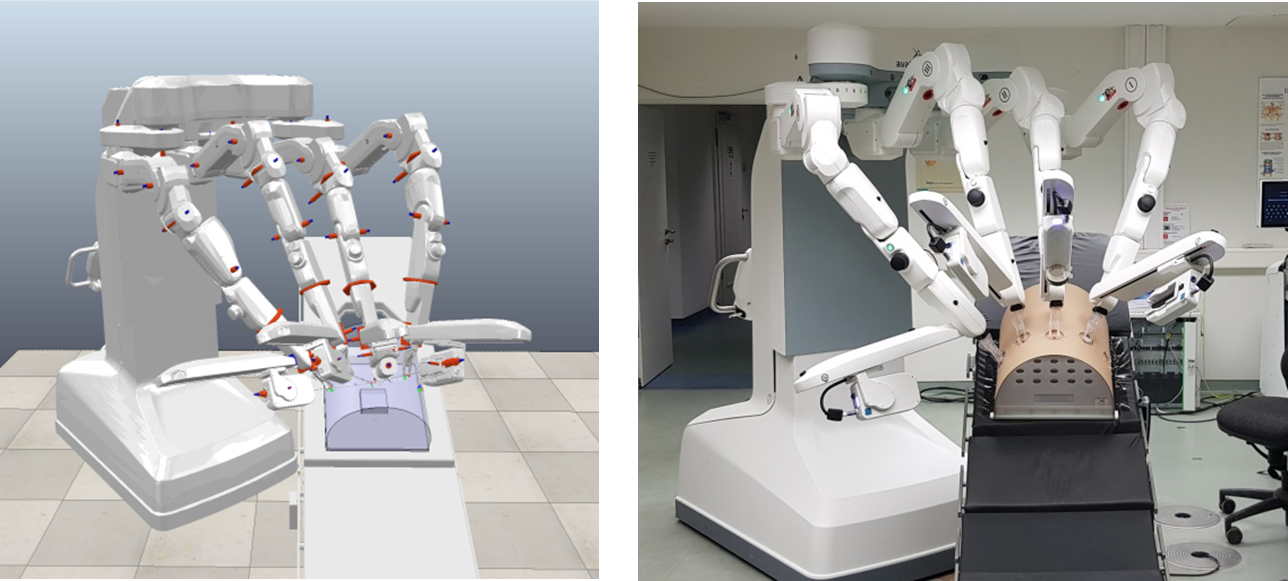
Under commission by the avatera medical GmbH (https://www.avatera.eu/home), ICCAS is investigating the possibilities to optimize the positioning principles of a novel robotic system for laparoscopic interventions. In cooperation with the urology department of the University of Leipzig Medical Center, the requirements for the pre-positioning of the system at the OR-table were defined and transferred into robotic workspace simulations.
The aim of this work is to provide an intuitive procedure for the docking process of the robot at the OR-table and an optimized positioning for the robot arms at the patient for the best possible workspace during the intervention. ICCAS developed a guidance manual for the side docking of the system and currently investigates the feasibility for radical prostatectomies and combined hysterectomies and Lymphadenectomies.