


Computerassistierte Bildgestützte Interventionen
Prof. Dr. Andreas Melzer
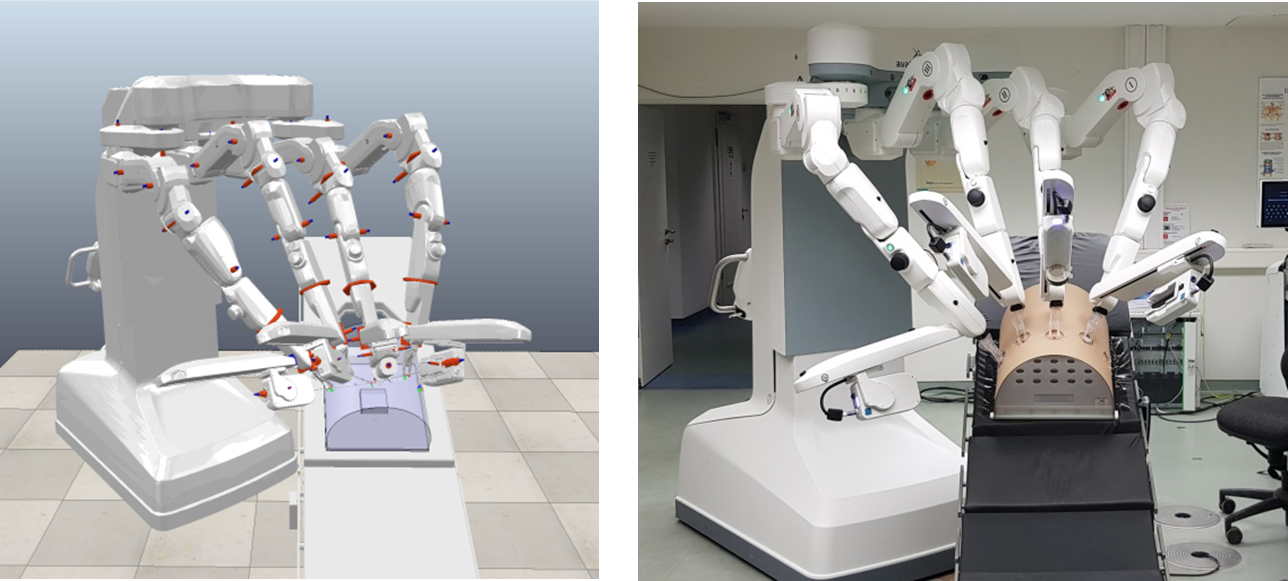
Im Auftrag der avatera medical GmbH (https://www.avatera.eu/home) untersucht das ICCAS die Möglichkeiten zur Optimierung der Positionierungsprinzipien eines neuartigen Robotersystems für laparoskopische Eingriffe. In Zusammenarbeit mit der Urologie des Universitätsklinikums Leipzig wurden die Anforderungen an die Vorpositionierung des Systems am OP-Tisch definiert und in robotergestützte Arbeitsraumsimulationen übertragen.
Ziel dieser Arbeit ist es, eine intuitive Vorgehensweise für den Andockprozess des Roboters am OP-Tisch und eine optimierte Positionierung der Roboterarme am Patienten für den bestmöglichen Arbeitsraum während des Eingriffs bereitzustellen. ICCAS hat einen Leitfaden für das seitliche Andocken des Systems entwickelt und untersucht derzeit die Machbarkeit für radikale Prostatektomien und kombinierte Hysterektomien und Lymphadenektomien.